Répondre à : Projet "robot car" en Arduino / étape 1 : assemblage
Accueil › Forums › Forums : Tous nos Projets › Projet "robot car" en Arduino / étape 1 : assemblage › Répondre à : Projet "robot car" en Arduino / étape 1 : assemblage
Moteur pas à pas pour le capteur de distance
Nouveau module à relier : Le moteur pas à pas pour porter et faire pivoter le capteur de distance.
Là, il faut passer par le shield sensor qui se fixe sur l’arduino pour simplifier les connexions.
Le plus compliqué est de fixer le capteur de distance,socle et moteur pas à pas.
C’est 3 éléments indépendants sont à viser et à accrocher pour permettre au moteur de faire pivoter le capteur de distance.

Des impulsions plus ou moins longues permettent de déplacer le moteur suivant des angles trigonométriques.
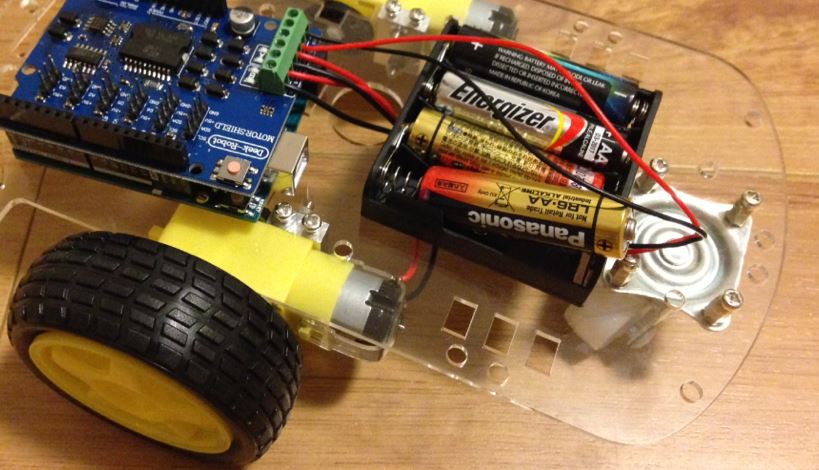
Boitier d’alimentation (piles)
Dernière étape est la fixation du boitier d’alimentation externe (4 piles 1,5V) afin de rendre le robot car autonome électriquement.
Là, tout est très simple. 2 fils à relier sur le shield sur l’entrée terre et 5v.
Bilan du montage
Voila, le chassis et les composants sont reliés . Ne reste maintenant que la partie programmation pour rendre le robot car « intelligent »….
A suivre mardi prochain …..
Posted in